Design of fuzzy control system for temperature and humidity in environmental laboratory
The traditional temperature and humidity closed-loop control usually uses switch control or PID control. The former is simple to implement but has poor accuracy, and the latter has high accuracy, but a mathematical model needs to be established, and the parameter setting requirements are high. , It is not easy to accurately model. Fuzzy control theory is an adaptive control technology that can simulate human brain intelligence and changes with the environment. It is suitable for nonlinear systems and complex systems that are difficult to accurately describe with mathematical models. Further, a new control mode combining neural network and fuzzy inference can be used.
1 Environment laboratory temperature and humidity monitoring system structure
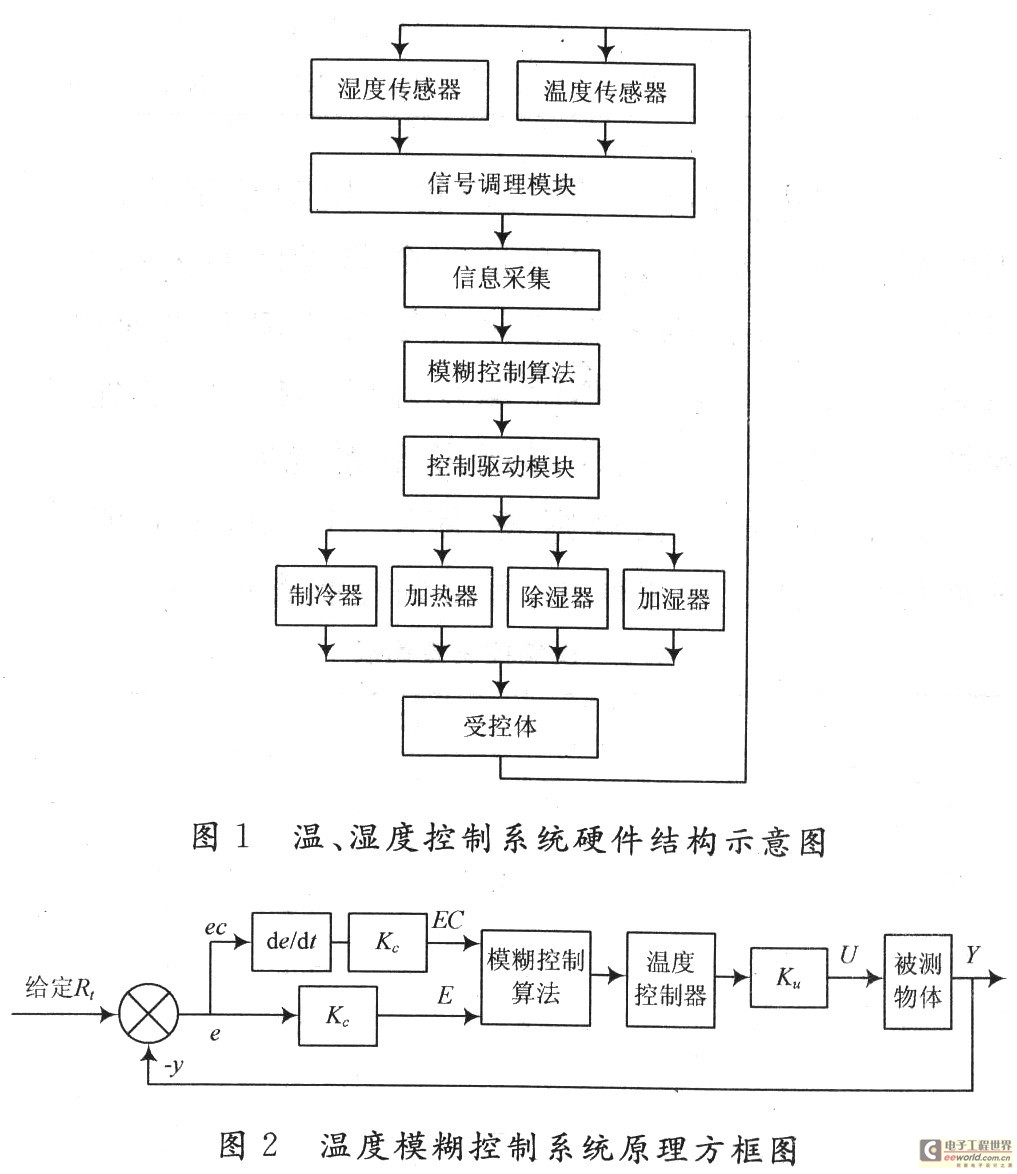
The environmental laboratory temperature and humidity monitoring and control mechanism is shown in Figure 1. The signals measured by the temperature and humidity sensors are conditioned and input into the fuzzy control algorithm module, which generates decision signals to control the driving parts (heater, refrigerator, humidifier, dehumidifier), keeping the temperature and humidity of the environmental laboratory constant at the set value .
2 Fuzzy control mechanism of control system
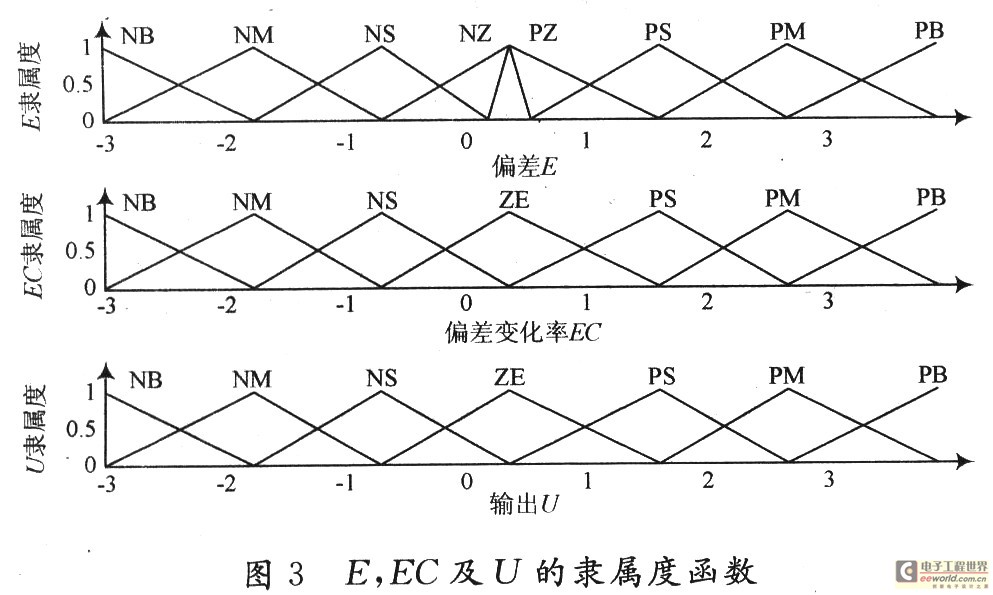
The typical fuzzy logic control consists of three parts: fuzzy, fuzzy reasoning and clarity. The following uses temperature control as an example to specifically explain. According to the traditional fuzzy control model, the principle of the temperature fuzzy control system in this design is shown in Figure 2.
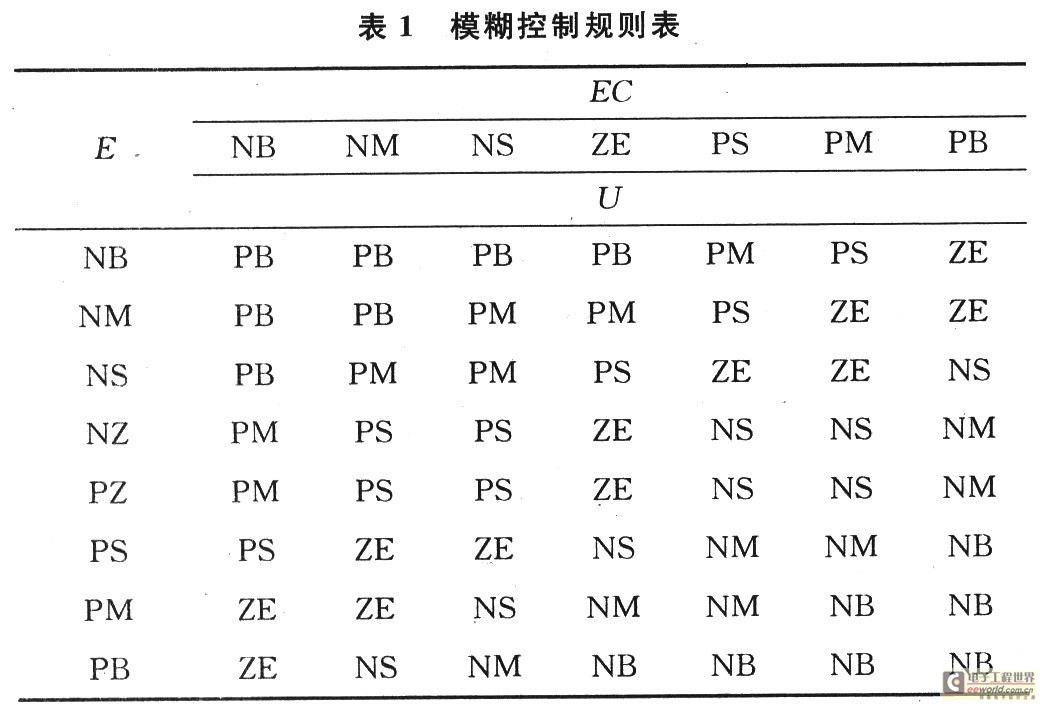
The fuzzy controller selects the dual-input and single-output control mode, taking the temperature error e and the error change rate ec as input variables, and u as the output variable. The fuzzy subset is E = EC = U = {NB, NM, NS, ZE, PS, PM, PB} = {negative large, negative medium, negative small, zero, positive small, positive medium, positive large), and its domain is : E = ec = u = [-3,3] = {-3, -2, -1,0,1,2,3}. The membership function uses a triangular distribution function, as shown in Figure 3.
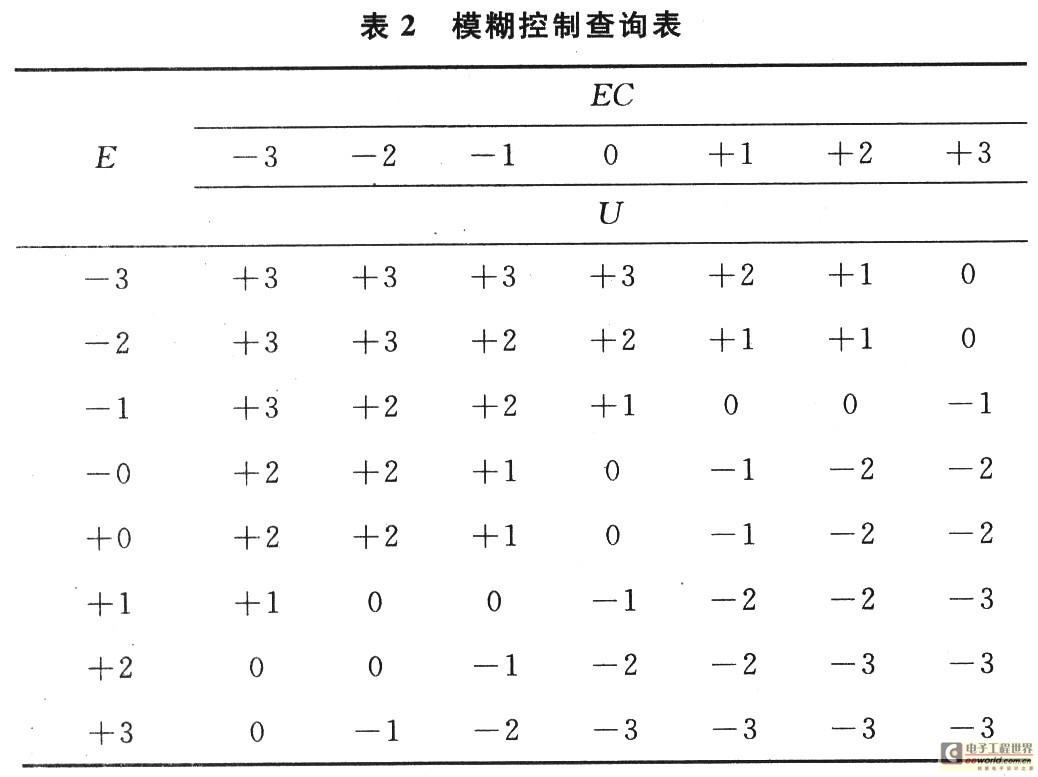
According to the input / output characteristics of the control system, with the elimination of temperature deviation as the control objective, the control rules are formulated as shown in Table 1.
Reasoning by fuzzy rules can get the input and output relationship of fuzzy controller language rules, and the relationship is a nonlinear relationship surface. When the deviation is large, the change of the control amount should try to reduce the deviation quickly; when the deviation is small, in addition to eliminating the deviation, the stability of the system must also be considered to prevent the system from overshooting and even cause system oscillation. From the membership function and rule table, the Mamdani reasoning method and the area center of gravity method are used to clarify the control query table.
The actual meaning of the corresponding output U is shown in Table 3.
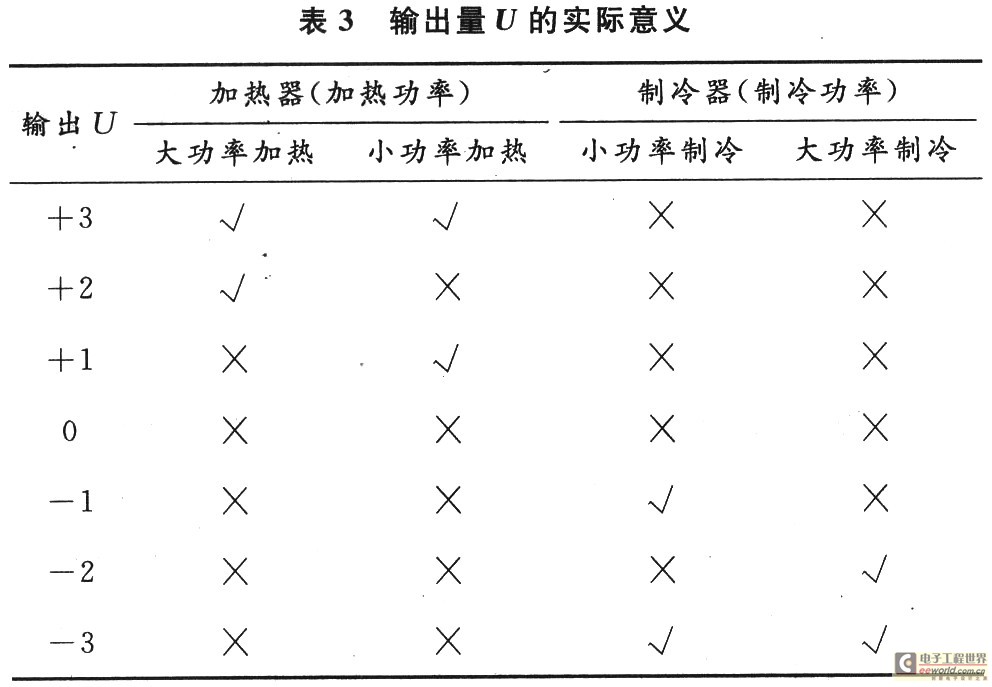
Note: √ means start; × means not start. Working mechanism: according to the two-dimensional constant array established by the fuzzy control lookup table, the input deviation E and deviation change rate EC are quantified to its basic variable domain, and the rows and columns of the array are retrieved in real time The look-up table obtains the real-time output U, and controls the heater or refrigerator according to the actual meaning of the output U, thereby driving the temperature to stabilize at the set value.
3 Control system programming
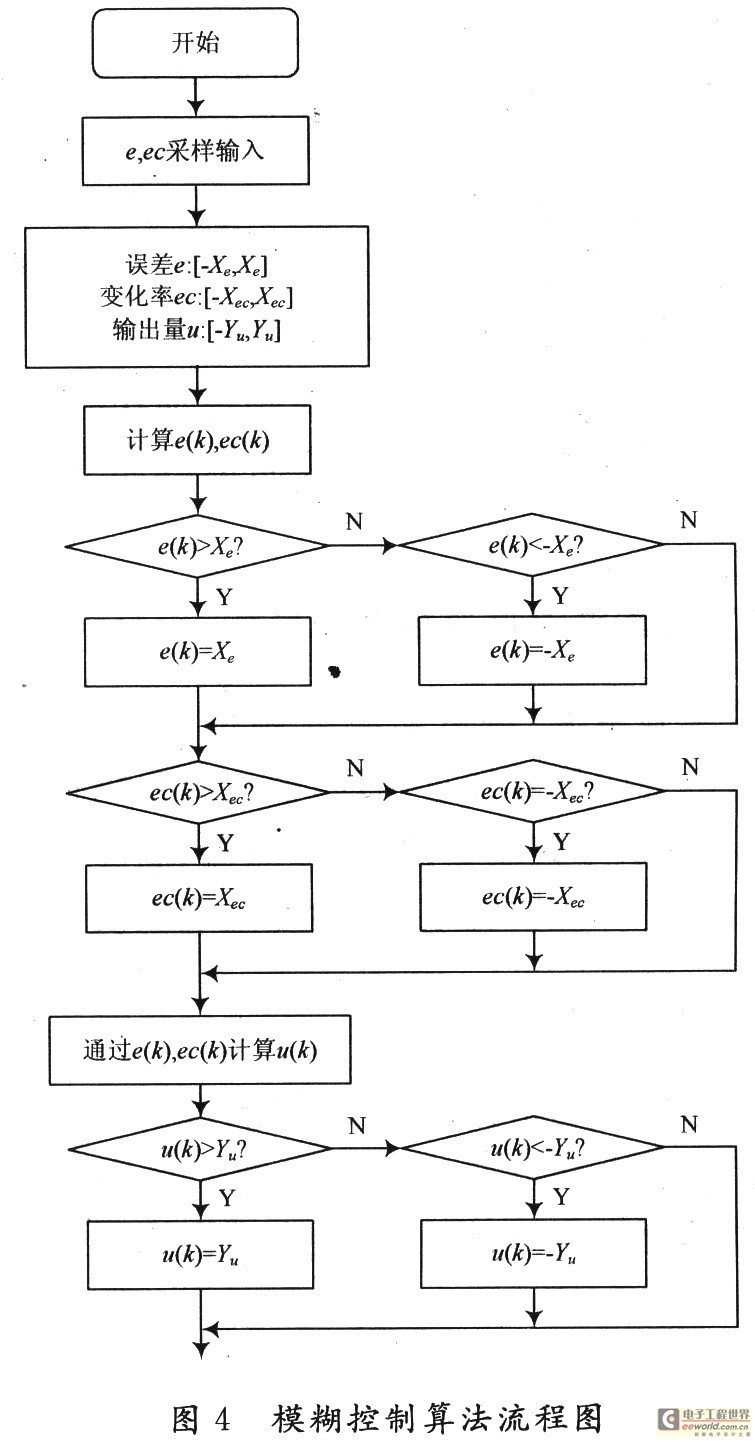
ST language is used for program design, including main program, fuzzy control algorithm, interrupt service program, operation command and alarm program. The flowchart of fuzzy control algorithm program is shown in Figure 4.
4 Application effect
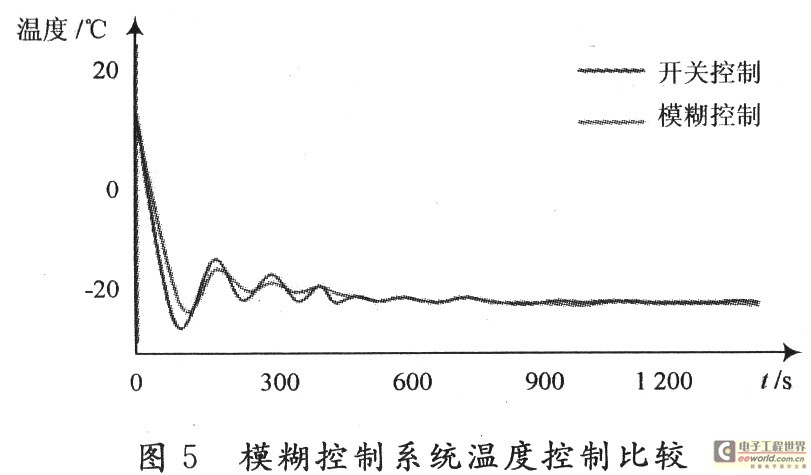
The external ambient temperature is reduced from 16 ° C to -20 ° C. The application effect is shown in Figure 5. It takes 510 s from the beginning to the basic stability (± 1 ° C difference from the set value), and the fluctuation range after the system is stable is ± O. Within 8 ℃. Convergence speed and system stability are related to quantization factor and scale factor. Reasonably choose quantization factor and scale factor to achieve a balance between convergence speed and stability.
5 Conclusion
This design uses a control strategy based on fuzzy control theory to achieve reliable measurement and control of temperature and humidity in environmental laboratories. It has the advantages of high accuracy, good stability, and fast convergence speed. Compared with traditional switch control systems, it has accuracy , Speed, and stability advantages; Compared with the fuzzy control method based on prediction, double fuzzy control strategy, parameter self-learning fuzzy control strategy, the calculation complexity is reduced. For the environment with obvious coupling effect of temperature and humidity, you can use the decoupling calculation of temperature and humidity, and then control them separately.
Various Puffs Vape,Disposable Vape Etsy,Allo Disposable Vape,Various Puffs Vape Atomizer
Lensen Electronics Co., Ltd , https://www.lensenvape.com