This paper proposes an AGV chassis control system with PMAC2 PC-104 motion controller as the controller. Using PMAC as the controller makes the multi-axis control easier, and the control system is more open and real-time.
1 AGV system hardware composition
PMAC (Programmable MulTI-Axis Controller) is a programmable multi-axis motion controller launched by the American Delta Tau Digital System Company. It uses Motorola's DSP56300 processor as the CPU, which can achieve up to 8 coordinate systems simultaneous movement. The programs stored in it operate independently [2], using PMAC as the AGV controller, the physical structure can be greatly simplified, and the system design and debugging process becomes simpler.
The AGV adopts 4-wheel-two-wheel drive, and the two left and right coaxial wheels are independently driven. The AGV driving state can be adjusted through the 2-wheel differential. It is suitable to use the PMAC motion controller as the core processor of the system. In order to achieve the PMAC multi-axis control function , Need to expand the corresponding I / O interface board on the PMAC board, and at the same time use servo motor, servo drive unit, encoder and corresponding sensors to form a complete set of open AGV control system, see Figure 1.
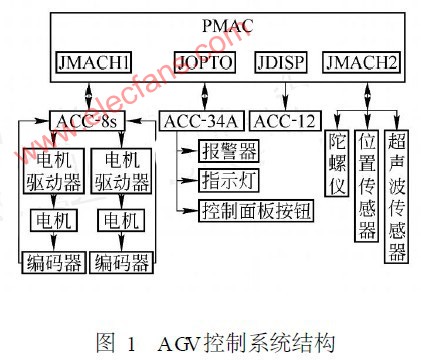
Among them, PMAC mainly realizes the control of AGV drive motor, control panel switch and alarm device.
2 Servo loop setting of AGV control system
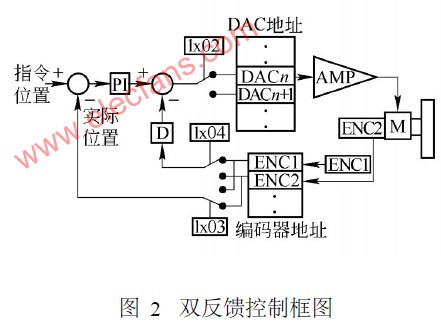
In order to ensure the accuracy and stability of the AGV operation, the motor control uses a speed and position dual feedback system, as shown in Figure 2. The variable lx03 points to the register address $ 720 as the address of the position encoder [3], and the position loop is closed every servo cycle. After processing, the data of the motor encoder is stored to the address specified by lx03, and the position loop is closed. The variable lx04 points to the register address $ 721 as the address of the speed encoder, and the speed loop is closed every servo cycle. The gyro data is processed and stored in the address specified by lx04, and the speed loop is closed. To use the dual feedback system, the lx25 variable needs to be set to 1 to enable the PMAC hardware position capture function and improve the control accuracy.
3 upper computer communication programming
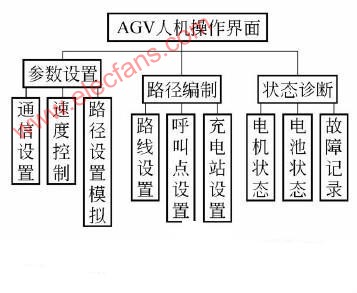
The AGV control software is designed using Visual C + +, and realizes the control of the AGV car movement route through various parameter settings of PMAC, as shown in Figure 3. The AGV control software mainly realizes the functions of parameter setting, path preparation and status diagnosis.
Delta Tau provides PComm32 dynamic link library for PMAC as a bridge between upper-layer applications and PMAC. PComm32 contains more than 200 functions for communication between all host computers and PMAC [4].
AGV control software realizes the control of PMAC by calling the function in PComm32. PComm32 includes PMAC1dll, PMAC1VXD, PMAC1SYS 3 parts, using the dynamic link library provided by it and combined with Visual C + + programming, by calling OpenPmacDevice provided by dynamic link library () , CloseP2macDevice (), PmacGetResponse (), PmacFlush () and other functions, the PC sends the relevant data of each action of the AGV to the PMAC in the form of ASC II code instructions, so as to realize the exchange of commands and information between the control software and the PMAC. The PMAC driver command program for PMAC to execute clockwise arc movement is as follows:
CLOSE
& 1 # 1-> 4000X set coordinate system
# 2-> 4000Y
OPEN PROG 10 CLEAR
GOSUB 20000 calls the center calculation subroutine
Q0 = Q3-Q9 Find the angle from the center of the circle to the end point
Q27 = ATAN2 (Q4-Q10)
WH ILE (Q28
ENDWH ILE
X (Q3) Y (Q4) final exercise
RETURN
N20000 subroutine for calculating center of circle
Q20 = SQRT ((Q3-Q1) * (Q3-Q1) + (Q4-Q2) * (Q4-Q2))
Q21 = Q5 * Q5-Q20 * Q20 / 4
FQ23 = SQRT (Q21)
Q0 = Q3-Q1
Q24 = ATAN2 (Q4-Q2) The angle from the start to the end
Q0 = Q20 / 2
Q25 = ATAN2 (Q23) The angle from the center to the center line
Q26 = Q24-Q25
Q9 = Q1 + Q5 * COS (Q26) center X coordinate
Q10 = Q2 + Q5 * SIN (Q26) center Y coordinate
RETURN
CLOSE
4 Conclusion
AGV integrates light, machine, electricity and computer, and integrates advanced theory and application technology in the field of science and technology. With PMAC as the controller, it can meet the high real-time and high-precision requirements of AGV motion. Its open structure is easy to update the product line and transplant the system in the future.
references
1 Zhang Zhengyi 1AGV Technology Development Overview 1 Logistics Technology and Application, 2005 (7): 67-73
2 PMAC2 USERMANUAL1Delta Tau Data System, Inc1, 2003
3 PMAC2 Reference1Delta Tau Data System, Inc1, 2003
4 PComm32 PMAC 32 B itD river1Delta Tau Data System, Inc1, 2000
Aluminum circuit boards are widely used in LED lighting industry as the good heat dissipation and energy saving. LED light circuit boards always use white solder mask oil because of the good reflective. Our aluminum circuit boards are made of highly reflective white oil, which is 3-5% more reflective than ordinary white oil, whiter and better. Automatic production line for aluminum PCB has been introduced in our factory - fast delivery time, cost down, greatly increased productivity.
Led Pcb,Led Pcb Board,Led Bulb Circuit Board,Led Light Circuit Board
Chuangying Electronics Co.,Ltd , https://www.cwpcb.com