introduction
Public transportation has the strong advantage that individual transportation can't match. Giving priority to the development of urban public transportation system is the best way to solve the traffic problems in large and medium cities. In recent years, the intelligentization of urban public transport systems has become the main direction of public transport research. Most of the existing trial-run intelligent public transportation systems in China use GPS global positioning system for positioning, and GPRS network is used for data transmission. The vehicle GPS module can acquire navigation and positioning data such as position, direction and time in real time, and then transmit the data to the monitoring center through the vehicle GPRS module, thereby realizing the positioning and monitoring of the vehicle. The monitoring center can send the real-time information or announcement information of the vehicle to the electronic station card through the GPRS module of the electronic station card to estimate the arrival time and distance, and then display on the electronic station card. Although the existing trial-run intelligent public transportation system has a wide coverage and high precision, it can realize the full range of positioning and monitoring of the vehicle. However, in the actual operation process, the following deficiencies still exist:
GPS signals will have blind spots in tunnels and viaducts;
During operation, the GPS information needs to be sent to the monitoring center via GPRS, and then the monitoring center sends the display information to the electronic station card through GPRS, so the operating cost is high;
The GPRS module is expensive, the number of buses is large, and the GPRS module must be installed, and the hardware cost is high;
It is impossible to realize the communication between the bus and the stop sign, and it is also impossible to realize the services such as early reporting.
1 system overall plan
Due to the small size of Xi'an city, the concentration of roads and the dense bus lines, the distance between electronic stop signs is mostly around 500 meters. Therefore, it is not necessary for the monitoring center to monitor the bus in real time, but only need to know the stop sign of the bus. The range can be roughly positioned.
In order to absorb the advantages of the existing intelligent public transportation system scheme, overcome its shortcomings, and combine the characteristics of Xi'an city, this paper introduces ZigBee short-range wireless communication technology into the intelligent public transportation system, which is widely used in the existing trial-run intelligent public transportation system in China. The GPS positioning and GPRS information transmission scheme improves the data transmission mode. The overall architecture of the improved intelligent public transportation system scheme is shown in Figure 1.
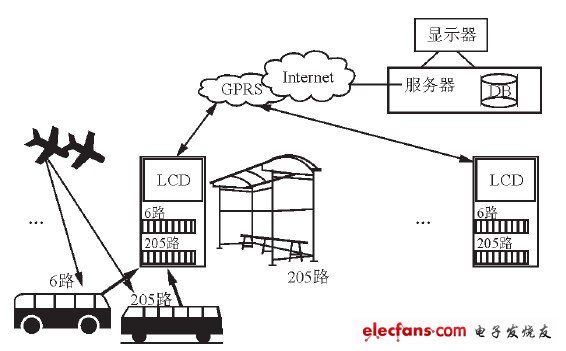
Figure 1 Overall plan of the intelligent public transport system
The system is mainly composed of three parts: bus terminal, electronic station terminal and management monitoring center server.
The bus terminal can locate the position information of the bus in real time according to the vehicle GPS module, and compare with the position information of each station card. When it arrives at a certain stop sign, the bus automatically announces the station and displays the station with the LCD screen. information.
The electronic station terminal and the bus terminal can communicate via the ZigBee short-range wireless communication network. Buses can be used to report in advance. When the bus arrives at a stop sign, it sends its own vehicle information, status information, etc. to the stop sign. After receiving the information of the management center, the electronic stop sign displays the location information of the bus on the electronic map of the stop sign.
The management center server and the electronic station terminal can communicate via the GPRS wireless communication network. The electronic station terminal is wirelessly networked through the GPRS module to process and re-enclose the received bus information and then transmit it to the wireless network. The server side is generally a PC connected to the Internet, and can receive information on the Internet through the TCP/IP protocol, and can also send real-time location information and announcement information of the bus on the running line to the electronic station terminal. The server can manage and query information through the database to facilitate the management and scheduling of the bus company.
2 system hardware design
2.1 Hardware components of the vehicle terminal
The vehicle terminal hardware in this system mainly includes power module or power access module, ARM processor, RAM, FLASH, GPS positioning module, ZigBee RF transmission module, video monitoring module, LCD display module, serial port and debugging module, number of people in the car. Statistics module and voice module. Figure 2 is a block diagram showing the hardware components of the vehicle-mounted terminal in the system.
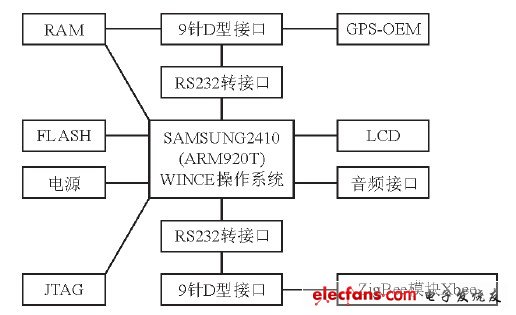
Figure 2 Block diagram of the hardware components of the vehicle terminal
The ARM embedded processor is the core of the entire vehicle terminal and can be connected to each functional module through various interfaces. This car terminal uses a 16/32-bit RISC embedded microprocessor based on the ARM920T core of South Korea's Samsung 802C. The S3C2410.S3C2410 can run at 203 MHz, which is mainly for cost-effective and low-power applications such as handheld devices.
In the intelligent public transportation system, the system positioning module generally uses a GPS-OEM (Original Equipment Manufacture) board.
In the embedded vehicle terminal system, when the GPS module is selected, several factors such as positioning accuracy, price, power consumption, volume, and anti-interference ability should be considered. According to the above principles, this design uses LEADTEK's GPS three-generation SiRF star III7855 module to achieve positioning. The main performance indicators of this module are as follows:
There are 20 parallel channels that can receive 20 satellites simultaneously;
Positioning time: Recapture time is 0.1 s, hot start <1s, cold start <42 s, automatic search less than 30 s;
Output differential accuracy up to 10 meters, power consumption is less than 1 W;
The ASCII code statement of the NEMA-0183 protocol can be output through the RS232 interface, including GPGGA, GPGSA, GPGSV, GPRMC, GPVTG, GPGLL, etc.
With a 5 V power supply, a DB9 interface can be connected via the TX and RX pins to communicate with the serial port of the embedded microprocessor.
FGI`s FGSVG series Static Var Generator (SVG) adopts modern power electronics, automation, microelectronics and network communication technologies, adopts advanced instantaneous reactive power theory and power decoupling algorithm based on synchronous coordinate transformation, operate as the control target with the set reactive power and size, power factor and grid voltage, etc. FGI`s static generator for sale meets the high-end needs of customers with its easy operation, high performance and high reliability.
Static Var Generator
Static Var Generator,Svc And Statcom,Statcom In Power System,Statcom Systems,Static Var,Active Var
SHENZHEN FGI SCIENCE AND TECHNOLOGY CO., LTD , https://www.fgi-tech.com