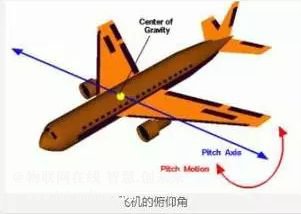
After experiencing the early remote control flight, its navigation control mode has been developed into __ autonomous flight and intelligent flight __. The change of navigation mode puts higher requirements on the accuracy of flight control computer; with the increase of the complexity of small unmanned aerial vehicles , the requirements for the operation speed of flight control computer are higher; __ and the requirements for miniaturization The power consumption and volume of the flight control computer also puts high demands on __. High precision requires not only high computer control precision, but also the ability to run complex control algorithms. Miniaturization requires that the drone is small in size and maneuverable, and the smaller the control computer is required. Among the many processor chips, the chip that is most suitable for the small flight control computer CPU is TI's TMS320LF2407. Its computing speed and numerous peripheral interface circuits are suitable for real-time control of small UAVs.
It adopts Harvard architecture and multi-stage pipeline operation to simultaneously read data and instructions. The on-chip self-contained resources include 16 10-bit A/D converters with automatic sequencing function to ensure that up to 16 channels have conversion during the same conversion period. Perform without increasing CPU overhead; 40 channels of universal input/output channels that can be individually programmed or multiplexed; 5 external interrupts; integrated serial communication interface (SCI) for other controllers in the system The ability to perform asynchronous (RS 485) communication; the 16-bit synchronous serial peripheral interface (SPI) can be easily used to communicate with other peripheral devices; the watchdog timer module (WDT) and CAN communication module are also provided.
Flight control system
The flight control system collects the flight state data measured by each sensor in real time, and receives the control commands and data transmitted by the radio monitoring and control terminal from the uplink channel of the ground monitoring and control station. After calculation, the control command is output to the executing mechanism to realize the UAV. Control of various flight modes and management and control of mission equipment; simultaneously transmit the status data of the drone and the operational status parameters of the engine, onboard power supply system and mission equipment to the onboard radio data terminal in real time, via radio The channel is sent back to the ground station. According to the function division, the hardware of the flight control system includes: __ main control module, signal conditioning and interface module, data acquisition module and servo drive module.
Module function
The various functional modules are combined to form the core of the flight control system , and the main control module is the core of the flight control system. It is combined with the signal conditioning module, the interface module and the servo drive module, and only needs to modify the software and simply change the peripheral circuit. Based on the requirements of a series of small UAV flight control and flight management functions, it can achieve one development, multiple models, and reduce system development costs. The system mainly completes the following functions:
(1) Complete high-precision acquisition of multi-channel analog signals, including gyro signal, heading signal, rudder angle signal, engine speed, cylinder temperature signal, dynamic and static pressure sensor signal, power supply voltage signal, etc. Due to the accuracy of the CPU's own A/D and the limited number of channels, an additional data acquisition circuit is used, the chip select and control signals are generated by the decoding circuit in the EPLD.
(2) The output switching signal, analog signal and PWM pulse signal can be adapted to the control requirements of different actuators (such as rudder, aileron servo, elevator, air passage and damper).
(3) Communication with onboard data terminals, GPS signals, digital sensors, and related task devices is realized by using a plurality of communication channels. Since the serial port configured by the CPU's own SCI channel cannot meet the system requirements, the design uses multiple serial port expansion chips 28C94 to expand 8 serial ports.
It adopts Harvard architecture and multi-stage pipeline operation to simultaneously read data and instructions. The on-chip self-contained resources include 16 10-bit A/D converters with automatic sequencing function to ensure that up to 16 channels have conversion during the same conversion period. Perform without increasing CPU overhead; 40 channels of universal input/output channels that can be individually programmed or multiplexed; 5 external interrupts; integrated serial communication interface (SCI) for other controllers in the system The ability to perform asynchronous (RS 485) communication; the 16-bit synchronous serial peripheral interface (SPI) can be easily used to communicate with other peripheral devices; the watchdog timer module (WDT) and CAN communication module are also provided.
Flight control system
The flight control system collects the flight state data measured by each sensor in real time, and receives the control commands and data transmitted by the radio monitoring and control terminal from the uplink channel of the ground monitoring and control station. After calculation, the control command is output to the executing mechanism to realize the UAV. Control of various flight modes and management and control of mission equipment; simultaneously transmit the status data of the drone and the operational status parameters of the engine, onboard power supply system and mission equipment to the onboard radio data terminal in real time, via radio The channel is sent back to the ground station. According to the function division, the hardware of the flight control system includes: __ main control module, signal conditioning and interface module, data acquisition module and servo drive module.
Module function
The various functional modules are combined to form the core of the flight control system , and the main control module is the core of the flight control system. It is combined with the signal conditioning module, the interface module and the servo drive module, and only needs to modify the software and simply change the peripheral circuit. Based on the requirements of a series of small UAV flight control and flight management functions, it can achieve one development, multiple models, and reduce system development costs. The system mainly completes the following functions:
(1) Complete high-precision acquisition of multi-channel analog signals, including gyro signal, heading signal, rudder angle signal, engine speed, cylinder temperature signal, dynamic and static pressure sensor signal, power supply voltage signal, etc. Due to the accuracy of the CPU's own A/D and the limited number of channels, an additional data acquisition circuit is used, the chip select and control signals are generated by the decoding circuit in the EPLD.
(2) The output switching signal, analog signal and PWM pulse signal can be adapted to the control requirements of different actuators (such as rudder, aileron servo, elevator, air passage and damper).
(3) Communication with onboard data terminals, GPS signals, digital sensors, and related task devices is realized by using a plurality of communication channels. Since the serial port configured by the CPU's own SCI channel cannot meet the system requirements, the design uses multiple serial port expansion chips 28C94 to expand 8 serial ports.
planar magnetics transformer,planar transformer altium,flyback planar transformer,coilcraft planar transformer
IHUA INDUSTRIES CO.,LTD. , https://www.ihua-transformer.com