
In fact, the name of artificial muscle is not very good, the more appropriate name should be called electroactive smart material. Because I am doing the direction of the underwater robot, so for the next example, I will take the underwater robot as an example. Before that, you need to talk about related concepts. For the actuators of electrically driven robots, there are roughly two types: one is pure mechanical drive and the other is smart material drive.
Among them, digital servos and stepper motors are all kinds of motors, also known as motors. Their main role is to generate drive torque as a power source for electrical appliances or various machinery. The digital servo only needs to send the PWM signal once to maintain a certain position, but the range of rotation is limited, mostly 180 degrees or 360 degrees; while the stepper motor can not achieve position control, but can continue in one direction. Turn. Therefore, by applying the motor to the joints of the robot, it is easy to realize the motion required by the robot.
The smart material drive relies on the deformation caused by the energization or temperature change of smart materials such as SMA (shape memory alloy), EMA (electromagneTIc actuaTIon), and IPMC (ionic polymer metal composite) to generate the driving force.
The Chinese name of SMA is called shape memory alloy. It is an alloy material that can completely eliminate its deformation at lower temperature and restore its original shape before deformation after heating. It can be used for the control elements of the alarm and the driving device of the stylus.
EMA is an electromagnetic drive, and its principle is also very simple. The conductor moves relative to the magnetic field, and an induced current is generated in the conductor. The induced current interacts with the original magnetic field to move the conductor. This is the electromagnetic drive. Since the force generated by electromagnetic is relatively small, EMA is often used in situations where it does not require too much force to drive. The Chinese name of IPMC is called ionic polymer metal composite. Because of its low driving voltage, it can produce large displacement deformation. Therefore, it is used more in the robot field. Next, I will use this example to carry out this material. Description.
Although on the surface, smart material drive is a new continent in the field of robotic drive, it seems that it can greatly reduce the size of the robot and transform its cold machine shape by deep digging and large-scale use. However, the shape variables of smart materials are very limited compared to mechanical drives, and the precision is not enough, so it is regrettable to tell you that the so-called "artificial muscles" in the field of robots is really small.
Below I will use IPMC (ionic polymer metal composite) as an example to explain a little.
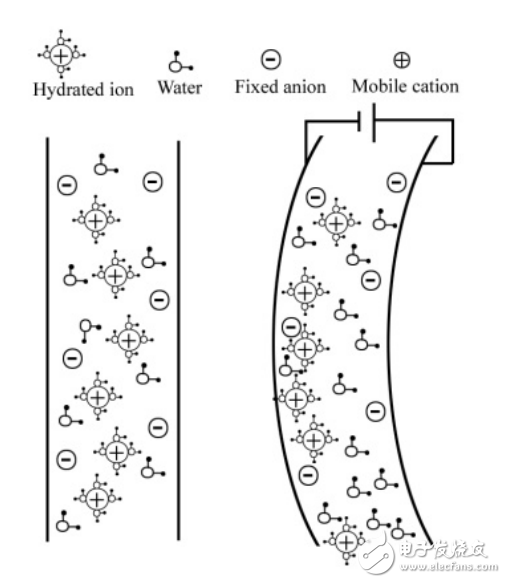
Generally, when a voltage is applied to the thickness direction of the IPMC, the IPMC will bend toward the anode. The principle is shown in the following figure. Then people can naturally take advantage of this feature: power-deformation-drive, use it on the robot, let it produce the corresponding movement. Moreover, this material is small in size, light in weight, capable of generating large movements, and does not require bearings and sliding parts, and has a low driving voltage. These features seem to be better than the big one of the motor, which can reduce the floor space.
A digital servo can give it to where we need it by giving it a duty cycle. But the deformation of IPMC is a non-linear process that requires me to calibrate a little bit before I can finally use it. Moreover, his shape variable is also very limited, and the biggest one can only be bent from a straight state to ninety degrees, and there is a curvature, which is not ideal.
Therefore, such smart materials can be used where control accuracy is not too high.
For example, I want to control a robot so that it can imitate the jellyfish's jet propulsion mode. It doesn't need to control how much to open, how much to shrink, as long as it can be contracted, let the robot swim, this kind of domain intelligence The material can occupy a position. In 2012, Joseph Najem and others at the Virginia Tech Center for Intelligent Materials Systems and Structures used IPMC as a driver to design a biomimetic jellyfish based on Victoria's multi-tube luminescent jellyfish. The physical prototype is shown below.
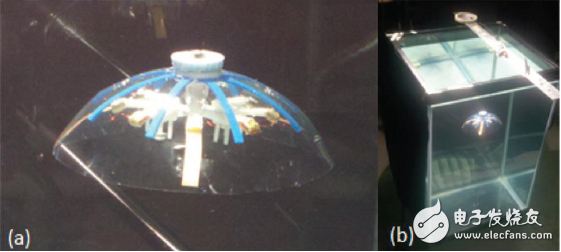
(a) Machine jellyfish physical prototype (b) experimental device
The machine jellyfish has a flexible cavity made of a heat-shrinkable polymer membrane, a center column, a platform for wiring and supporting the drive, and 8 for maintaining the upper stable mast and the radial IPMC driver. The machine has a jellyfish weight of 20g, a diameter of 15 cm and a height of 5.8 cm. Since the IPMC material can be bent under the action of an electric field, this driver can be constructed to simulate the shrinkage and expansion process of the jellyfish cavity, but unfortunately the speed of this machine jellyfish is only 0.77 mm/s, and the speed is very small. Is disappointed.
All in all, control accuracy is an important indicator in most robot control, and because of the small range of motion, the so-called artificial muscles cannot be used in large areas.
Deployable Drums,Deployable Drum With Wheels,Portable Pre-Terminated Cable Drum,Pre-Terminated Cable Drum
ShenZhen JunJin Technology Co.,Ltd , https://www.jjtcl.com