The networking and intelligence of automotive control functions have become an inevitable trend in the development of the modern automotive industry. As the CAN bus communication protocol abolished the traditional station address coding, the number of nodes in the CAN network will be unlimited, and the real-time performance is good. With high speed, it is widely used in automotive electronic control systems.
I. Introduction(a) CAN communication network description
CAN (Controller Area Network) is the controller area network, originally developed by Bosch, Germany, as a serial data communication protocol developed to solve the data exchange between many modern automotive control and test instruments. Basic data exchange.
The traditional data transmission method is: Each piece of data is transmitted through a wire. As data increases, the number of wires must increase and the number of connectors on the controller increase accordingly. This method is only applicable to data transmission with limited data volume, and using CAN bus can solve the above problems. The CAN bus is a form of network communication that allows all data to be transmitted over two twisted pairs and is not limited by the number of controllers and the amount of data transmitted between the controllers. The significance of the CAN bus in the case of a large amount of data exchange is even more significant.
(B) CAN bus structure
The structure of CAN is as follows:
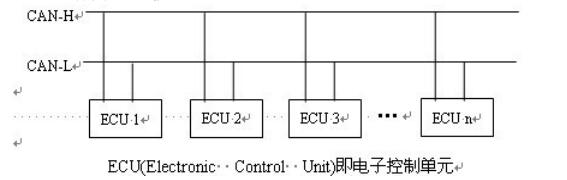
The CAN bus can operate in single-transmit, multi-receiving mode, as long as the device that needs a piece of information is connected to the bus, it can receive this information at the same time. Conversely, if a certain node on the bus needs some information, it just sends a request that needs this information, and the bus can provide the information unit to respond to it.
The CAN bus communication interface integrates the physical layer and data link layer functions of the CAN protocol and can complete framing processing of communication data, including bit stuffing, data block coding, cyclic redundancy check, and data link layer functions.
(C) The advantages of CAN bus
The CAN bus has the following advantages: 1. By changing the software, additional functions of the data transfer protocol can be obtained
The degree of expansion; 2. Do not need to change the nodes and application layer software and hardware to increase the node; 3. significantly reduce the error rate, continuous data transmission through the controller, data ratio
Compared with the protection of data transmission protocol, the error rate will be reduced to a minimum degree; 4. Data sharing significantly reduces the number of sensors and signal cables; 5. Faster data transfer between controllers; 6. Controllers and controls The connector of the device is smaller and more space-saving;
Second, CAN communication protocol definition(1) CAN data transmission format CAN is transmitted in the form of frames. Each frame of data in the standard format contains seven areas, namely, the start of the frame, the arbitration area, the control area, the data area, the CRC check, and the ACK response area. And the end of the frame.
as the picture shows:

Among them: Start bit, start of the marker data frame, it consists of a dominant bit, this dominant bit is used for hard synchronization of the CAN controller in the receiving state.
The RTR bit is generally sent by the sender to the bus autonomously, but it can also be sent remotely by the receiver by setting this bit to a recessive level. DLC bit, identifies the data length. CRC check bit, using cyclic redundancy check.
The acknowledgement bit is acknowledged by setting the recessive level on the sender's acknowledgement gap bit to the master level. If the master level does not appear, the sender determines that it was a transmission error.
The end bit consists of 7 recessive levels.
2.2, the definition of the identifier
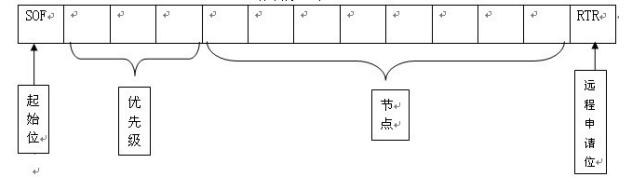
Priority refers to the identification of the sensor's priority class. Node refers to the identification of the node.
(B) Definition rules for automotive systems, subsystems and assemblies
In the CAN specification, the data area has a total of 8 bytes, and the addresses of the car's systems, subsystems, and assemblies as well as the transmitted data and encryption processing are all completed within this 8 bytes. The definition is as follows:

B7 and B6 bytes are address codes, which are used to define the system, subsystem, and assembly, and include the priority. The representation of the priority is determined by the size of the address code. The smaller the address code, the lower the priority. The higher.
B5 - B2 A total of 4 bytes (32 bits), used to define the data of the assembly. Uses a standard 32-bit fixed-point arithmetic format.
B1: Reserved byte. Reserve a byte for later expansion.
B0: encryption processing
Third, CAN bus communication module circuitThe CAN bus communication module is an important part of the vehicle's CAN bus node. It adopts a modular design independent of the system, 500 Kbps communication speed, and the software is compatible with the entire vehicle CAN bus communication protocol and can be transplanted to any node.
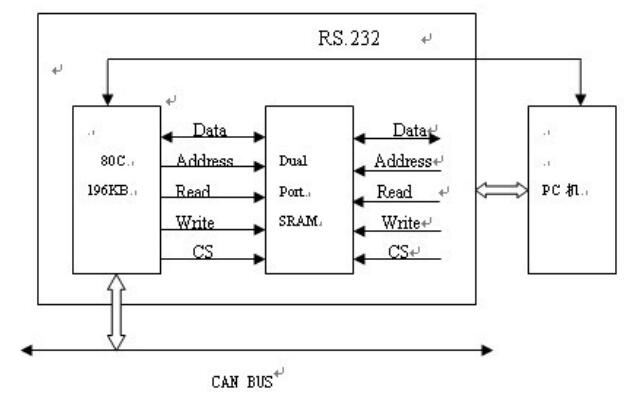
The module consists of two chips and their peripheral components. Embedded microcontroller system with CAN bus manager and dual port RAM. It mainly completes the following functions:
1. The CAN bus manager is responsible for the CAN standard 2.0A CAN bus data communication;
2. Data filter; 3. Local communication (including high-speed 8-bit parallel communication and low-speed RS-232 communication).
Fourth, the conclusionWith the development of the automotive industry, electronic control systems will be increasingly applied to the automotive field. If the CAN bus mode is not used, data transmission and coordinated control between electronic control systems will not be realized. Therefore, the development of the automotive CAN bus is an inevitable trend for the development of modern automobiles.
P02-M Series Push Wire Connectors
Super thin, room saving, economically efficient
Inter lock structure, can be combined to desired number of poles
Multi-pole push-in connector
Mono/dual press button for easy wiring and releasing
Compatible with earth tag and/or cable clamp
Fixed Foot connector Terminal,Minitype Wire Connector,super slim fast Connectors,high performance fast connectors
Jiangmen Krealux Electrical Appliances Co.,Ltd. , https://www.krealux-online.com