1.1 Project Summary
The corridor cleaning robot organically combines mobile robot technology and vacuum cleaner technology to achieve independent cleaning of indoor environment. It integrates mechanics, electronic technology, sensor technology, computer technology, control technology, robot technology, artificial intelligence and many other disciplines. It is an environmentally friendly, healthy and intelligent service robot with good application prospects and extensive market demand. In recent years, indoor floor cleaning robots have received attention at home and abroad and become a new research direction in the service robot industry. Our team has strong hands-on ability, is good at 2D and 3D software members, has creative thinking, is proficient in sensors, and more importantly, we all have a strong sense of responsibility. Based on the research status of the above projects and the situation of the project members, together with Zhang Lei's open-minded guidance. We have significant advantages in terms of professional skills and abilities, as well as teamwork.
1.2 Project Background / Motivation
With the rapid development of computer technology, artificial intelligence technology, sensing technology and mobile robot technology in recent years, the development and development of the corridor cleaning robot control system has a solid foundation and good development prospects, so this project has a very high It can be implemented; at the same time, the corridor cleaning robot is an environmentally friendly, healthy and intelligent service robot, which is in line with the era of green environmental protection in the current era. Moreover, there are many aspects of the domestic corridor cleaning robot (such as the stability of climbing). Sex, clean comprehensiveness, etc.) need to be improved, there is a need for development; our team members dare to explore, innovate, have a certain interest and foundation for sensor control, and with the instructive guidance of teacher guidance, we decided to study one Road cleaning robot.
Second, the demand analysis2.1 Functional requirements
1 In the simulation scenario, the stairs can be climbed and have sufficient stability and reliability;
2 able to identify the marker by itself and walk in time to avoid obstacles;
3 can automatically identify the garbage and clean it up.
2.2 Performance standards
1 When climbing on the stairs, it will not stop running suddenly, and it has sufficient stability and reliability;
2 When identifying the marker, it will not be mistaken for the garbage to be cleaned;
3 When the marker is encountered, the obstacle can always be smoothly avoided, and the braking phenomenon does not occur;
4 can automatically identify and clean the garbage of 1cm2 and below.
Design
3.1 System function realization principle
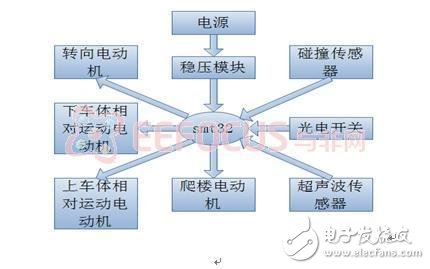
Figure 1 hardware architecture diagram
Structure and composition
1smt32 2 power supply
3 steering motor 4 voltage regulator module
5 collision sensor 6 photoelectric switch
7 ultrasonic sensors 8 climbing motor
9 upper body relative motion motor 10 lower body relative motion motor
3.2 Hardware Resource Configuration
Hardware resource configuration
1 collision sensor 2 climbing motor
3 ultrasonic sensor 4 photoelectric sensor
5 upper and lower body relative motion motor 6 steering motor
7 racks 8 wheels
9 coupling 10 car body
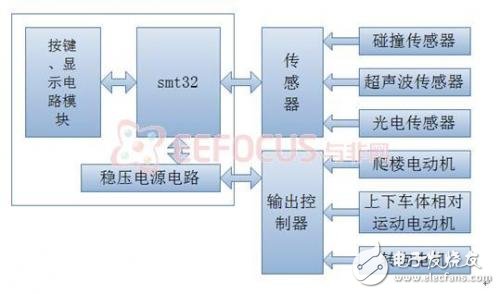
Figure 2 system hardware block diagram
3.3 system software architecture
Structure and composition
14 sensors. They are: photoelectric switch signal sensor, ultrasonic ranging signal sensor, collision switch signal sensor, camera signal sensor.
The 2Stm32 processor has four kinds of judgment results: whether it is on the step, whether it is walking straight, whether there is any obstacle, and whether there is garbage.
3 motor, gear, rack, wheel, coupling, car body, etc.
Shenzhen Sunbeam New Energy Co., Ltd , https://www.sunbeambattery.com